基于OpenPose算法优化的交互式桌面机器人
预览截图

项目名称:基于OpenPose算法优化的交互式桌面机器人
团队成员:唐裕胜、穆瑞莹
指导老师:董宝光、赵萌
项目概述:
智能机器人发展迅速且应用拓宽,正从传统工业场景渗入人机共享空间、协同作业等新兴领域,服务、医疗等行业的应用推动其研究重点从人机分离式工业机器人转向人机协同交互式机器人。这类机器人对实时性、轻量化、高鲁棒性要求严格,动作识别和反馈环节的计算与响应速度直接影响用户体验,高鲁棒性还能提升动作识别等模块的准确性与高效性,以优化人机交互体验。
关键技术:
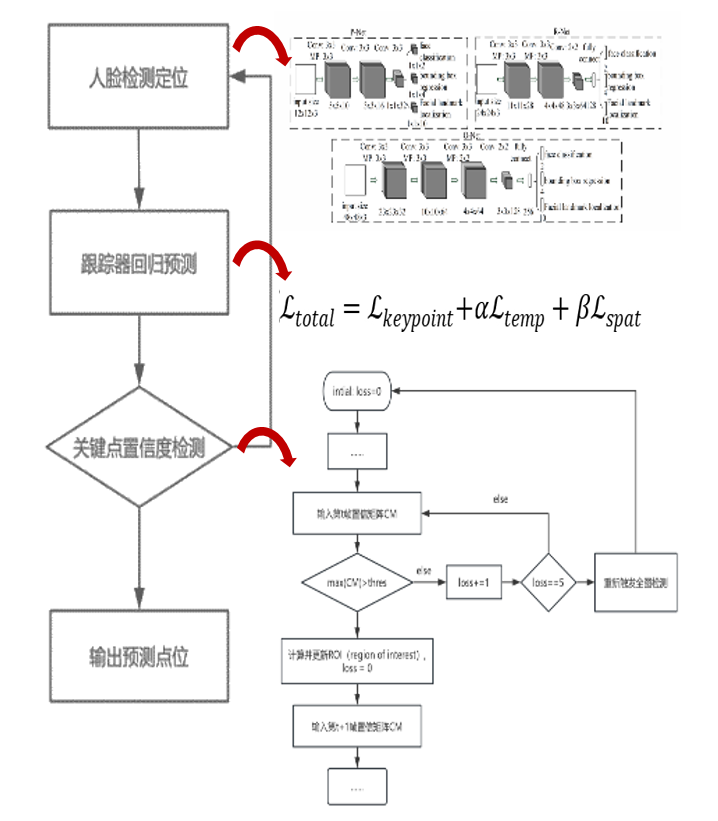
①双阶段动态推理引擎:解剖学先验检测+动作回归预测(外加置信度监督)
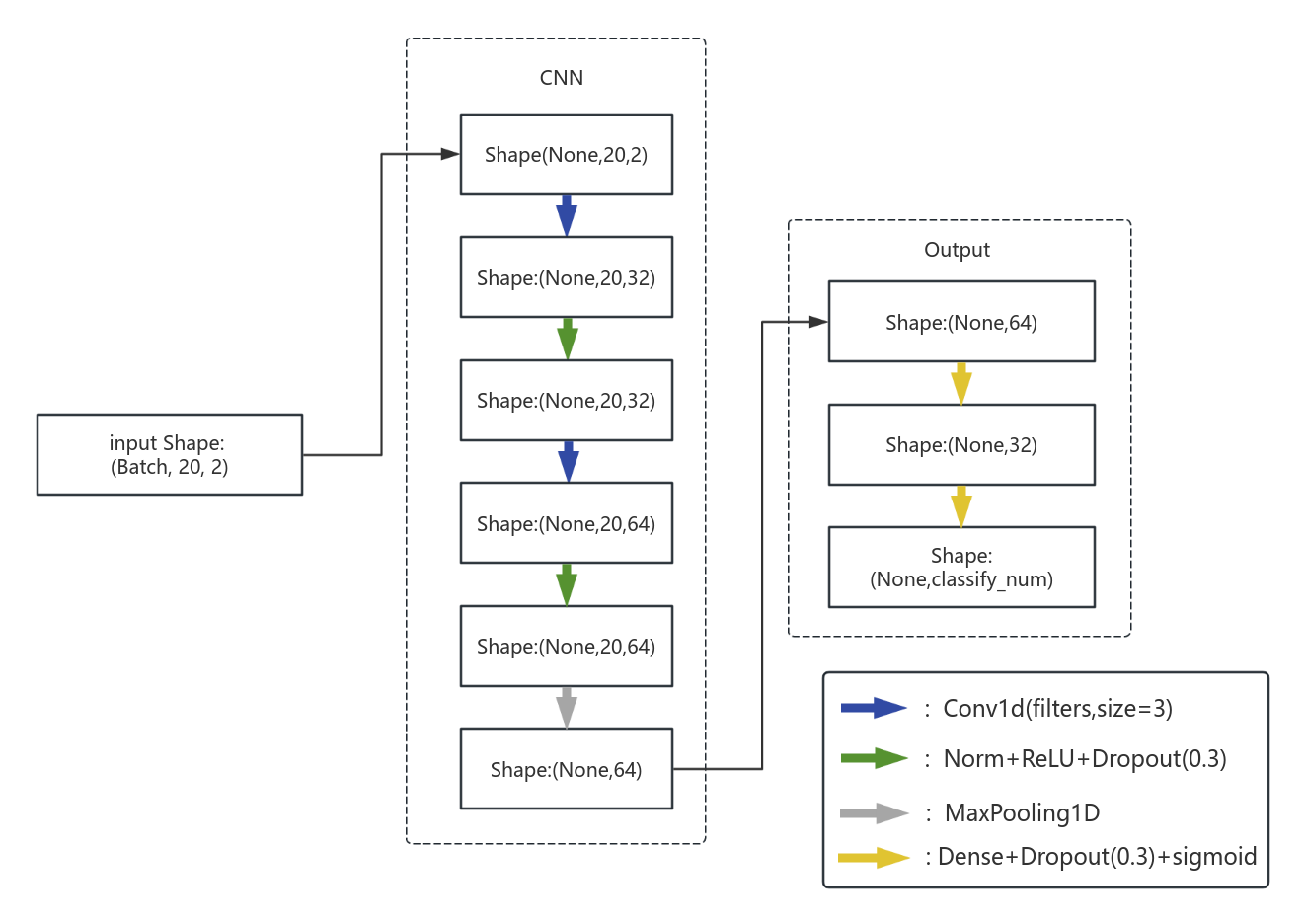
②轻量对抗网络:CNN卷积网络融合时空注意力机制,支持用户自由设计动态手势识别。
应用情况:
该研究虽验证轻量级 AI 在嵌入式机器人的可行性,但复杂场景落地仍有挑战,需拓展多模态信息融合与个性化增量学习。未来将从三方向深入,还制定分阶段计划,先 4 个月优化模型适配硬件,再 6 个月完善多模态系统,最后 5 个月搭建学习框架并试用优化,以推进产品成熟。


©当前作品的著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: iMuseum数字创新博物馆 » 基于OpenPose算法优化的交互式桌面机器人