精灵科技-全自主眼科手术机器人
预览截图


项目名称:精灵科技-全自主眼科手术机器人
项目负责人:翟雨轩
团队成员 :翟雨轩、王盛吉、程文泉、张传昊

指导老师:
廖洪恩老师担任清华大学生物医学工程系教授、国际医学生物工程联合会,亚太区共同主席,国家级高层次人才计划入选者、国家特聘专家、亚洲计算机辅助外科学会理事长等职。
张琦老师担任清华大学基础工业训练中心讲师,双创教学部部长,创客教育基地联盟副秘书长等职。
项目概述:
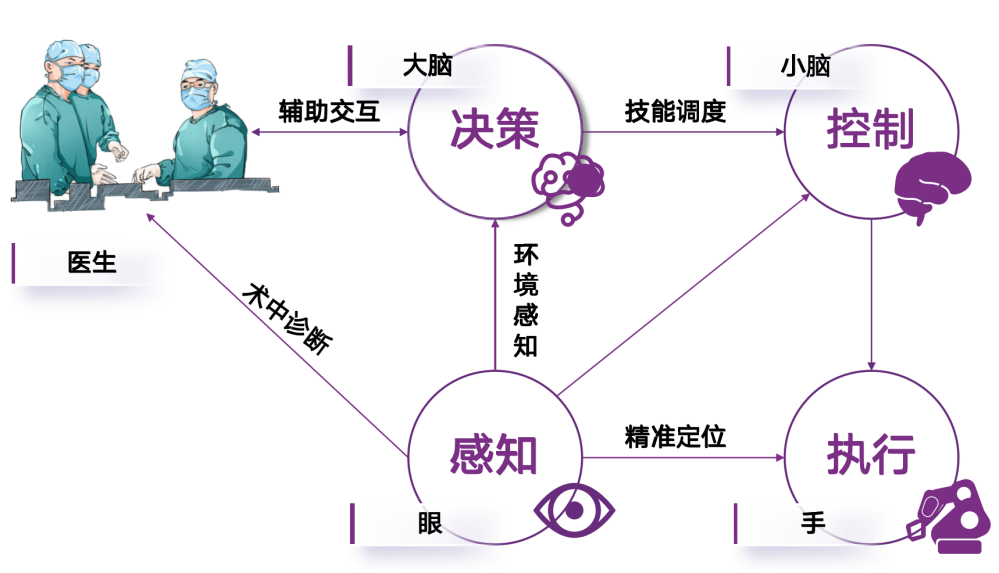
目前,手术机器人的自主化与智能化还处在非常初期的阶段,缺少数字化标准化的引导系统。精灵科技面对高精度的微操作手术场景,从手、眼、脑三个角度出发结合人工智能算法,机器人技术,以及先进的医学影像成像技术,开发了全自主眼科手术机器人系统。本项目旨在让机器人具备专家级技能的自主执行能力,并能在高精度的场景下完成与人类专家协同完成复杂任务。本项目开发的机器人系统有望引导或辅助医生更精准,更高水平、更高效地完成手术操作;提高基层医生的手术能力,突破医疗资源不均衡的瓶颈,也为新的手术范式的探索提供了可能。

关键技术 :
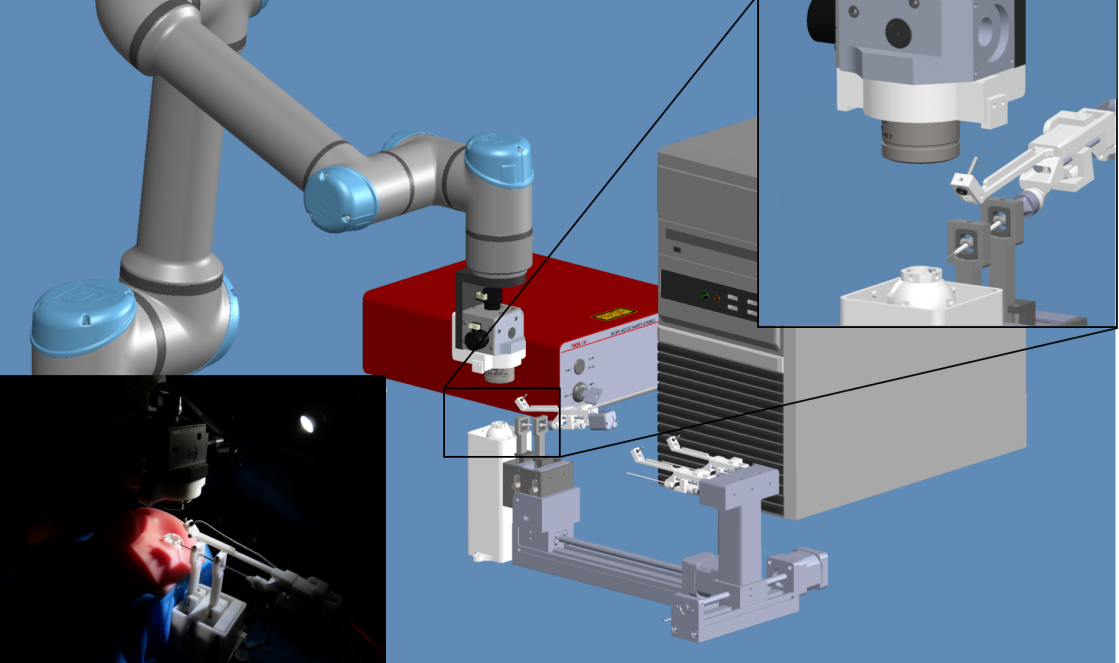
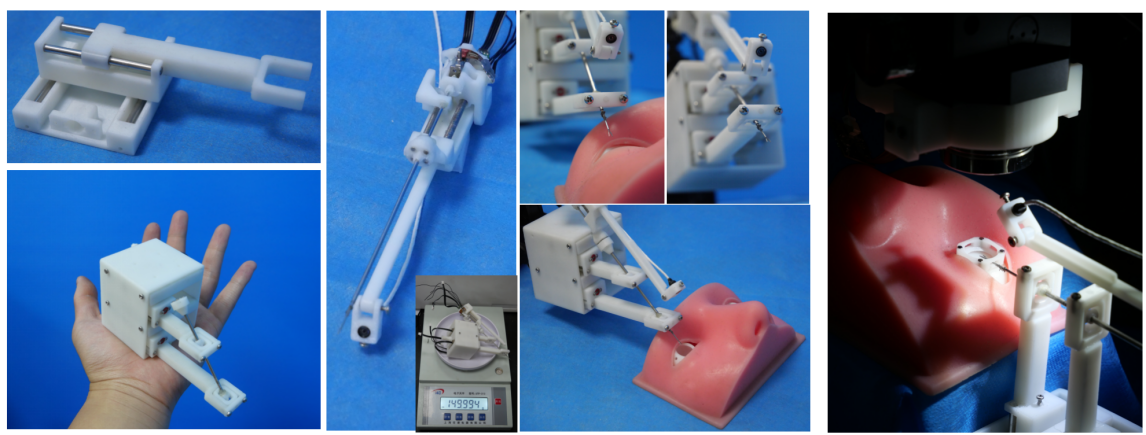
微操作手术机器人系统
微操作手术机器人与多模态术中影像成像系统

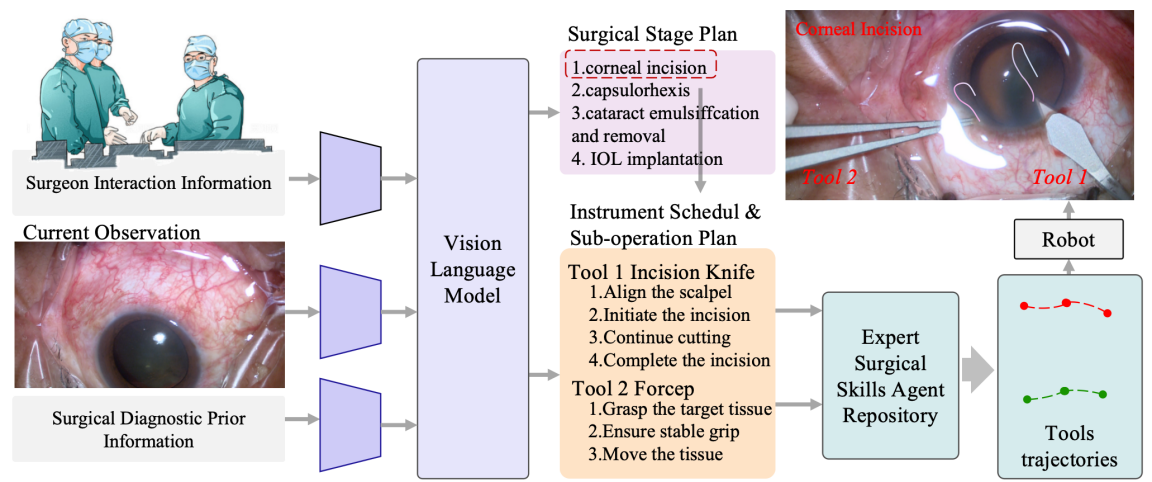
机器人自主手术执行AI闭环框架

应用情况:
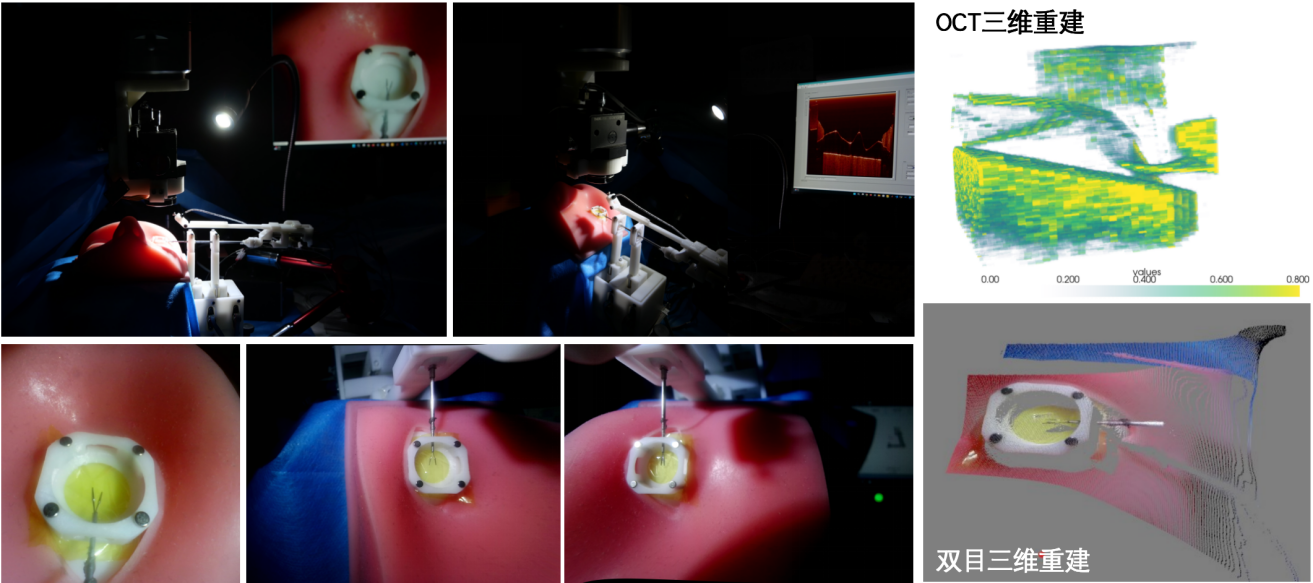
本项目将形成微操作手术机器人系统与智能手术导航系统软硬件两套系统。微操作手术机器人系统包含微操作手术机器人与机器人辅助新一代光学相干断层成像系统,实现对手术目标对微米级成像、三维重建与手术操作。智能手术导航系统通过多模态信息动态精准捕捉病灶关键信息;基于深度学习模仿学习方法,学习专家术者的手术技能;结合视觉语言模型全局感知规划手术流程,调度手术器械,规划手术路径;从而控制高精度眼科手术机器人自主完成手术任务。
眼科手术模型操作场景

本项目已完成第一代原型机的开发,并在眼科手术体外模型上开展算法测试与迭代优化;目前正推进手术技能库的积累,并提升模型的泛化能力,同时推进动物实验。此外,项目也致力于提高产品的适用场景、丰富用户范围:不仅应用于眼科手术,也将广泛推广至显微微操作领域,如神经外科手术、心血管手术以及基础医学动物手术实验。目前正开展面向显微微操作的灵巧手系统研究与开发。
©当前作品的著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: iMuseum数字创新博物馆 » 精灵科技-全自主眼科手术机器人