智合擎翼
预览截图





项目名称:智合擎翼
团队成员介绍:
团队共五人,其中贾博(车辆学院博士生)负责总体规划与整体布局,刘易林(航院博士生)负责飞行控制,其余两人参与控制研究,一人参与机械设计,均为行健书院本科生。

指导老师介绍:
董宝光,清华大学基础工业训练中心设计与原型实验室执行主任、工程师。
井平安,清华大学基础工业训练中心工程师。
项目概述:
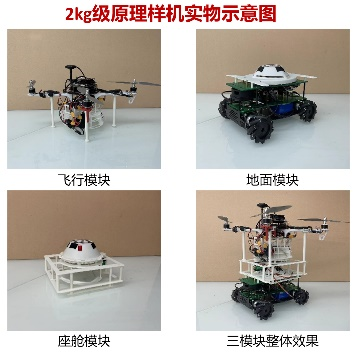
分体式飞行汽车可极大减轻飞行负载,有效增大飞行里程,并可灵活应对各种突发情况。其核心技术在于高效、可靠的对接装置以及控制技术。本项目创新设计出两种模块间对接装置,提出并实现了一种GNSS定位与Apriltag视觉远近结合的自主引导对接控制方案,采用MQTT协议实现了模块间实时信息传输,制备2kg与10kg级样机并检验了可靠性。团队成员以第一作者申请并授权专利8项,1项发明专利处于实质审查阶段。



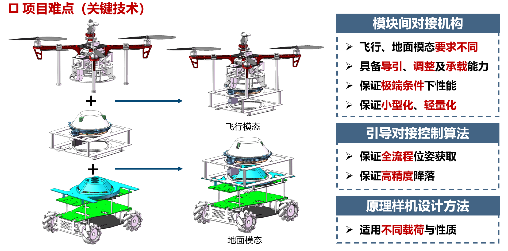
关键技术:
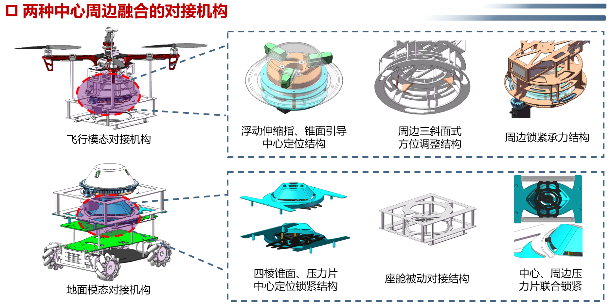
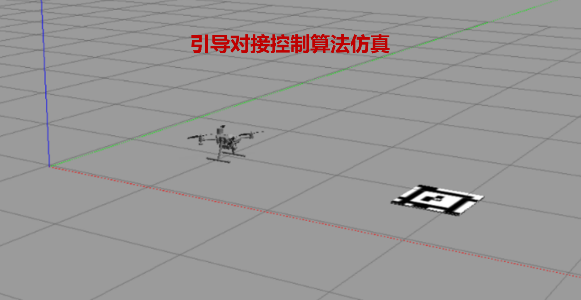
项目以三分离式、无人机主动导向型分体式飞行汽车为核心,提出了空地一体化协同运载技术。通过设计中心-周边融合对接机构与四点定位减震结构,实现高精度机械对接与可靠承载;采用GNSS与Apriltag视觉融合算法实现厘米级定位,引导无人机自主降落与结合;并利用MQTT协议完成三模块间低延时通讯与协同控制。系统经仿真与实机测试验证,在三级风条件下对接成功率达96%,水平误差≤10cm、偏航误差≤5°,显著提升了低空经济中空地协作系统的智能化与稳定性。



应用情况:
该分体式飞行汽车系统在低空物流与载人交通领域具有广泛应用潜力。
在物流方面,利用无人机与无人车协同,可实现“空地一体化”的自动货物转运,大幅降低人力成本并提高末端配送效率,适用于山区、农村等复杂地形的无人配送任务。
在载人出行方面,通过座舱模块与飞行、地面模块的快速切换,实现城市“空地联行”,缩短通勤时间。该系统已与一机集团达成合作意向,并在多项科技竞赛中获奖,具备工程化与商业化转化前景。


©当前作品的著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: iMuseum数字创新博物馆 » 智合擎翼