清华大学-未来仿生机器人兴趣团队
预览截图

社团名称:清华大学-未来仿生机器人兴趣团队
团队成员介绍:
组长:
岳雅琪,女,清华美院大三环境设计专业
组员:
田城玮,女,清华美院大三环境设计专业
郝一帆,女,清华美院大二动画专业
赵晴飞,女,清华美院大三信息艺术设计专业
指导老师介绍:
梁雄,清华大学基础工业训练中心讲师,中国机械工程学会高级会员、国际仿生工程学会会员,主要从事机器人与精密制造、仿生学等方向的教学和研究工作。其任教的“仿生学探索与实践”课程,2024年度学生评教排名前5%(13个指标全部位于全校前5%)。
项目概述:
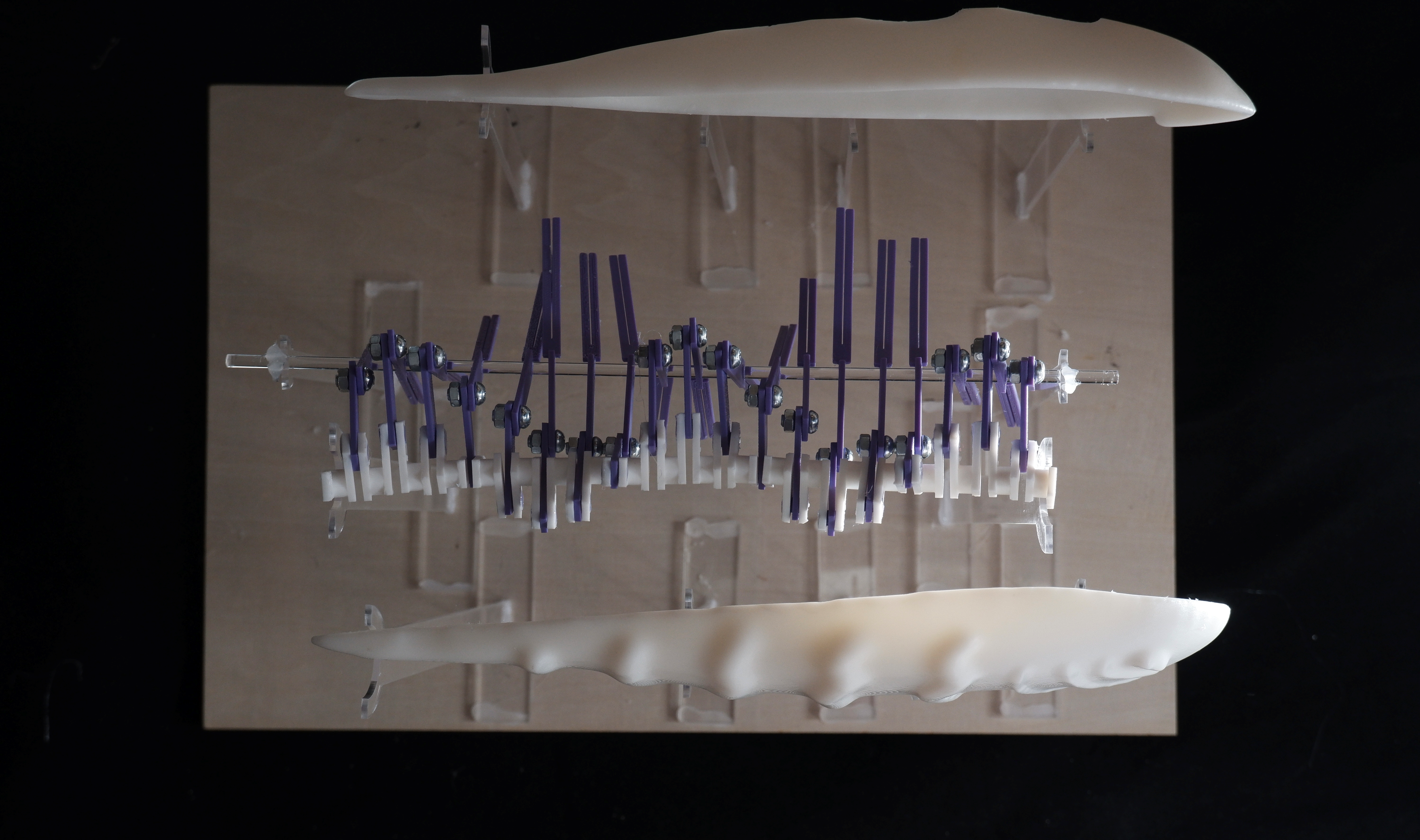
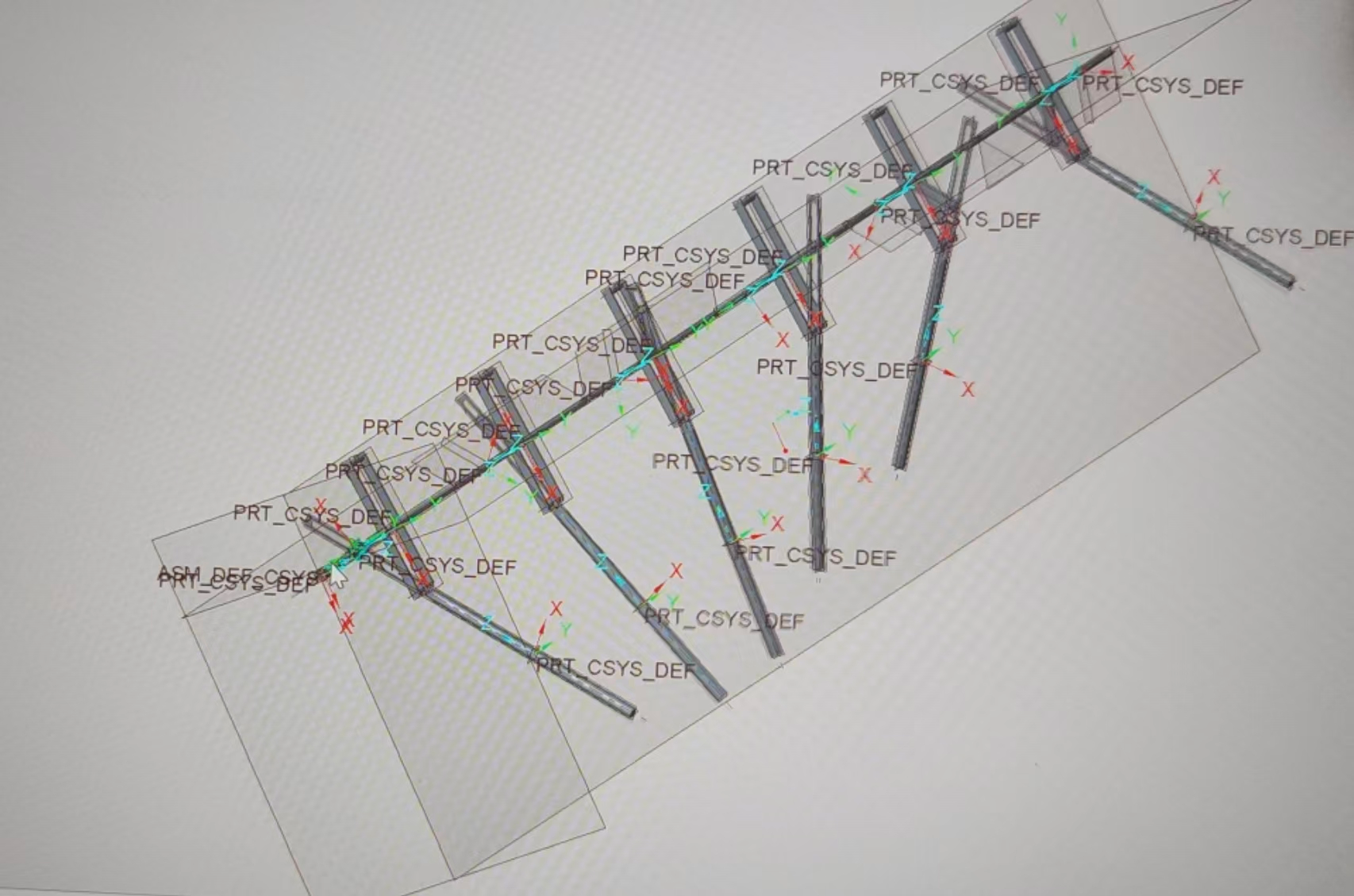
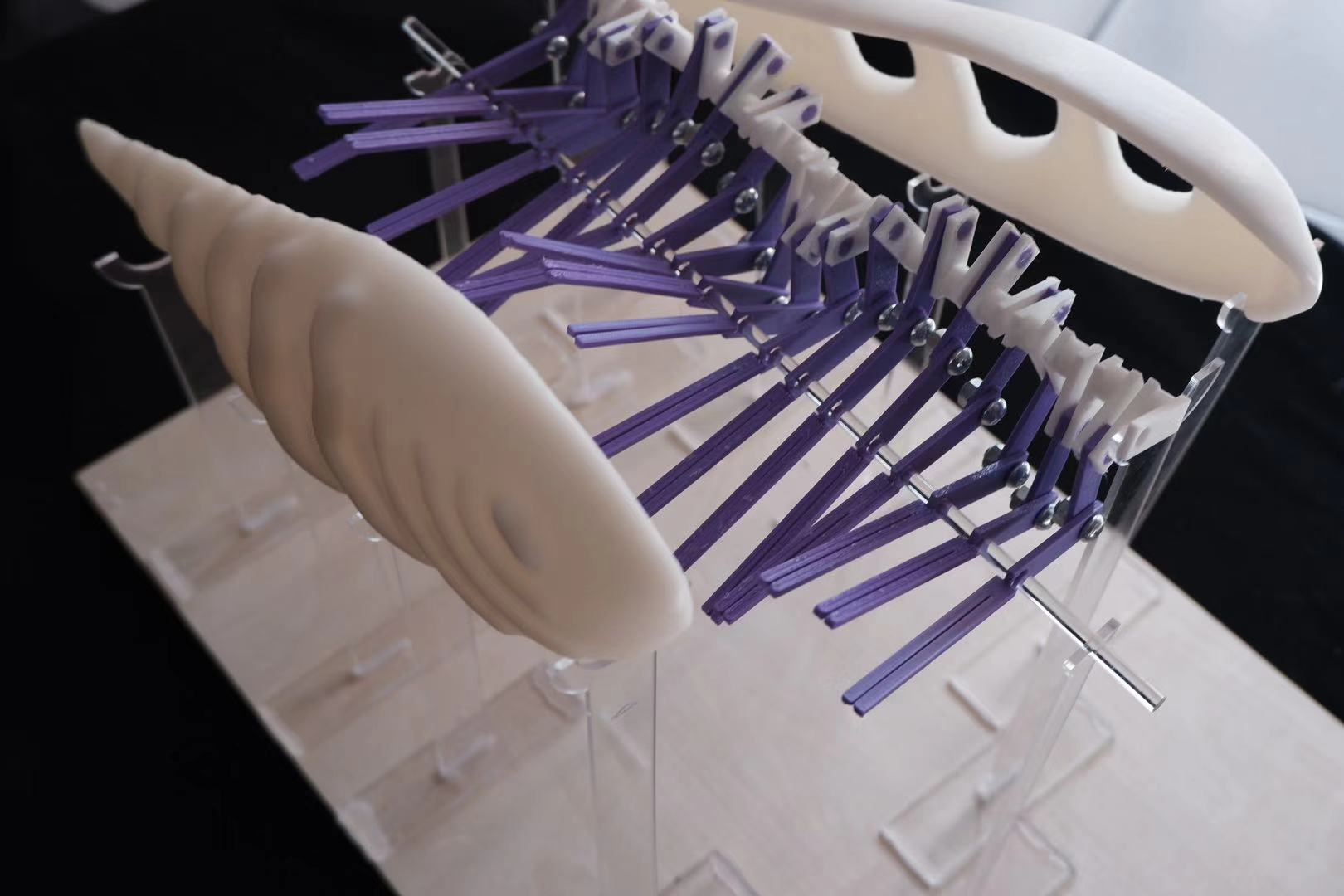
本项目旨在研发一款基于线翎电鳗长背鳍结构的仿生波动鳍机器人。通过研究其运动机理,项目拟采用曲柄摇杆机构或舵机驱动方式,设计高效波动鳍致动机构,并探索使用丁腈橡胶等防水材料以适应水下活动,创新性结合仿生运动机构与车轮式底盘,研究水陆环境适应性与运动模式切换问题。
关键技术:
本项目以线翎电鳗为仿生对象,研究其背鳍波动规律与推进机制,通过结构设计与控制系统优化,提升仿生机器人在水中的平衡与复杂运动能力。聚焦悬停、转向等高难度动作,解决水下推进器精细控制难题。关键在于实现高效稳定的波动鳍驱动、响应灵敏的控制策略与优良的流体动力学性能,为新型水下机器人提供仿生运动新路径。

应用情况:
该波动鳍水陆两栖仿生机器人在多环境适应与智能移动研究中具有广泛应用价值。可用于近岸与浅水区域的生态监测、水质参数采集及污染源识别,为环境演化与生态修复研究提供数据支持;在能源与智能系统研究中,可集成微型传感与能量收集模块,用于探索环境能量获取与自持运行机制;同时,可作为仿生运动与控制算法验证平台,服务于水陆协同机器人系统的基础研究与工程应用。

©当前作品的著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: iMuseum数字创新博物馆 » 清华大学-未来仿生机器人兴趣团队