Omniterra
预览截图



项目名称:Omniterra
团队成员介绍:
Omniterra团队由机械设计、嵌入式系统与运动控制方向研究生组成,成员熟悉传感器网络、嵌入式算法及电机驱动控制,具备多维运动系统建模与软硬件协同开发能力,能够独立完成复杂交互设备的结构与算法实现。

指导老师介绍:
指导老师张琦为中共党员,长期为项目发展提供专业支持。指导教师长期从事系统与智能控制领域研究,在多自由度平台控制、柔性传感与人机交互装置设计方面具有深厚积累,指导学生多次获得省部级创新成果奖,注重理论与工程实践结合。
项目概述:
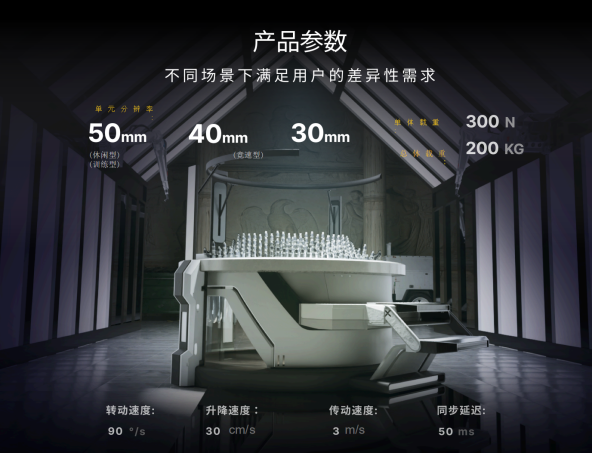
本项目聚焦三维可编程地形跑步机的核心控制系统研发,旨在实现用户步态与虚拟地形的实时耦合。系统采用单元阵列式模块结构,集成升降、旋转与滚动三自由度运动单元,通过嵌入式控制算法实现毫米级响应与平滑地形模拟,为虚拟现实和空间计算提供物理级触觉接口。

关键技术:
核心技术包括阵列控制拓扑设计、实时运动规划算法与多传感融合反馈系统。系统采用基于CAN总线与分布式同步协议的高速通信架构,结合PID与前馈控制算法,实现阵列模块的高精度同步运动。通过激光测距与惯性反馈优化响应延迟,确保复杂地形的连续平滑过渡。

应用情况:
样机系统已在实验环境中完成多场景演示,可实时模拟上坡、楼梯及软地形变化,实现用户脚步位置与地形高度的精准匹配。装置正与多家VR设备厂商及科研机构开展联合测试,用于沉浸式运动康复、空间计算接口及元宇宙物理交互平台建设。

©当前作品的著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: iMuseum数字创新博物馆 » Omniterra