水下机器人结构物检测解决方案
预览截图




项目名称:水下机器人结构物检测解决方案
团队成员介绍:
团队成员包括朝越、曹业淳、刘翊臣、董梦娇、温玒杰、吴宗桓、孙屹申、李翔宇。来自清华电子系、叉院、集成电路学院、类脑中心、中科院声学所。包括电子系科协、智能车协会核心技术骨干,潜艇制作爱好者,硬设、电子设计大赛特奖得主,资深水下三维重建研究人员。
指导老师介绍:
指导教师为基础工业训练中心的罗勇老师,主要研究方向为无人机、机器人、增材制造相关的研究及教学实践
项目概述:
本项目使用水下机器人搭载声呐、相机等9种传感器在实现水下精准定位的基础上对水下结构物进行检测。现有检测方法中,潜水员携带相机摸排的缺点是效率较低;声学检测方法分辨率不足以检测细小的裂缝、水泥脱落等缺陷;遥控水下机器人视觉检测结果不直观。本项目通过高效精准生成直观的三维图像解决现有问题。
关键技术:
1. 水下机器人平台
自研水下机器人经理了4个版本的迭代,为水下结构物检测任务提供稳定灵活的检测平台。优势在于6自由度稳定控制、可扩展性好,具备64TOPS高算力,支持有线遥控与潜水遥控两种模式。
2. 水下融合定位技术
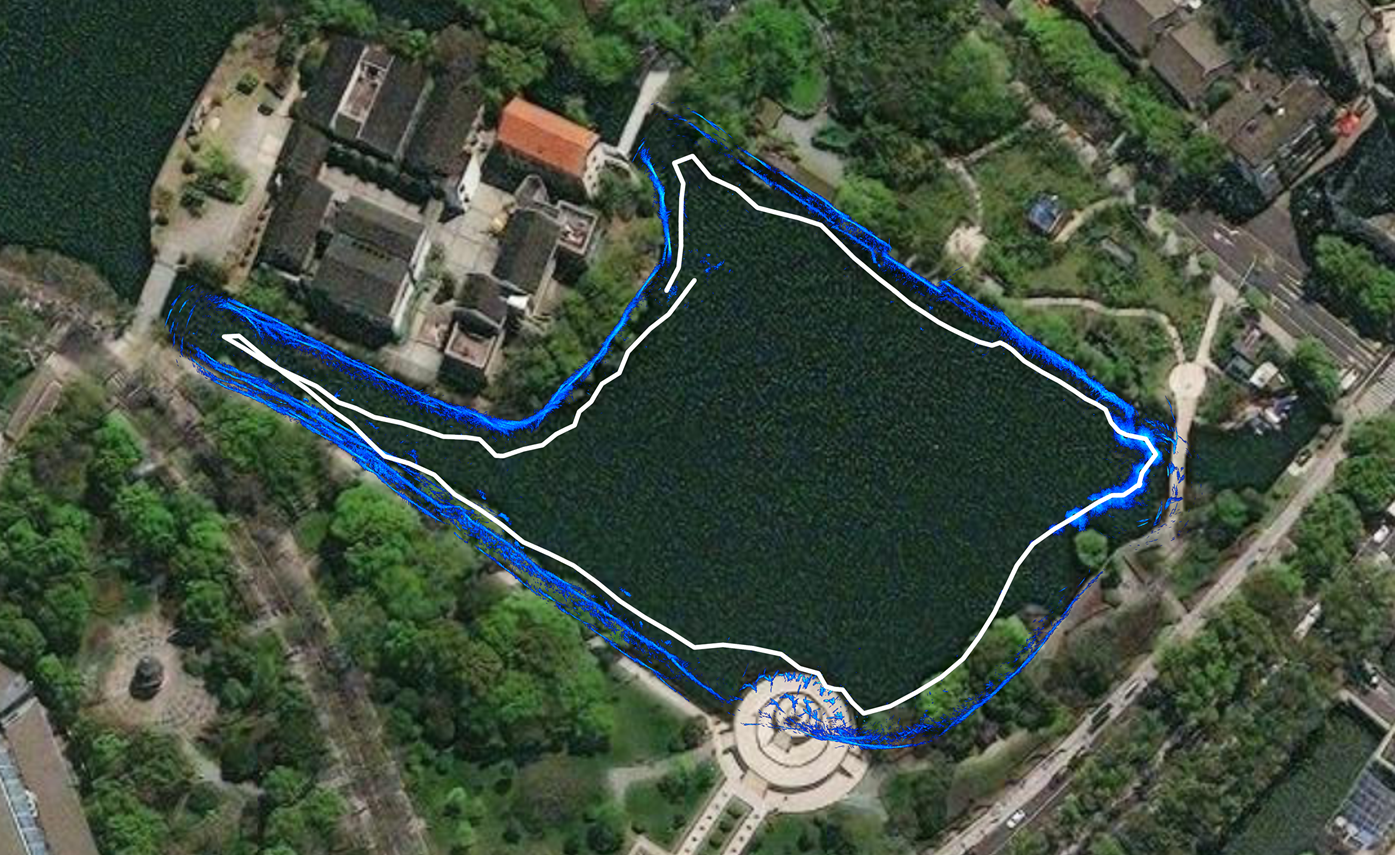
以声呐SLAM算法为核心,融合惯性导航、声呐SLAM和USBL定位等定位方式,为水下机器人提供稳定的定位信息,是大空间尺度中实现精准重建的基础。
图1水下机器人平台实验现场照

图2 水下融合定位算法构建的声学地图和定位结果
3. 图像增强
使用预训练的深度神经网络去除水体浑浊和光线传播损失带来的模糊和颜色失真。

图3图像增强前的原始图片

图4增强后的图片
4. 三维重建
水下三维重建在水下融合定位和图像增强算法的基础之上,利用倾斜摄影技术对图片进行处理,生成的三维图像相较传统录像更为直观,便于自动、准确标注缺陷位置,且可以作为三维数字孪生,建立数字化档案,便于周期性监测缺陷情况。

图5 三维重建结果
应用情况:
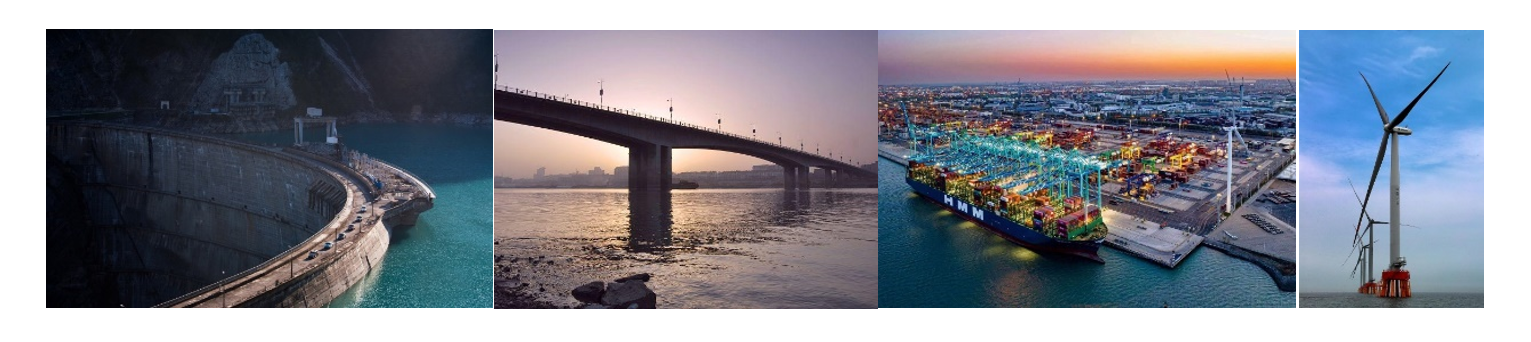
水下结构物检测的检测对象包括水坝坝体、水上桥梁的桥墩、港口墙身、货轮船体、水上风电基础和海上石油平台等。具体的检测需求包括常规运营检查(如普通水坝、桥梁周期三年),特定季节中的周期性检查(如水坝每年汛期前、中、后),突发状况时的检查(如港口或桥梁发生船只碰撞)。

图6 水坝坝体、桥梁桥墩、港口墙身和货轮、海上风电桩基
©当前作品的著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: iMuseum数字创新博物馆 » 水下机器人结构物检测解决方案