轮式机器人室内自动驾驶教学实训平台
预览截图


项目名称:轮式机器人室内自动驾驶教学实训平台
项目负责人:周晋
iCenter团队成员:周晋、杨明亮、王浩宇
项目背景:
在当前数智化浪潮下,具身智能正推动工程实践教学向沉浸交互与能力生成转型。然而,传统实训存在场景还原度低、教学与产业脱节等核心问题,难以培养适应智能制造要求的创新人才。本项目基于教育机器人这一核心载体,集成多模态感知与智能决策,聚焦“核心功能落地”与“工程能力培养”,致力于构建关键技术闭环,为破解产教融合壁垒、培育具备实战能力的卓越工程师提供必要支撑。

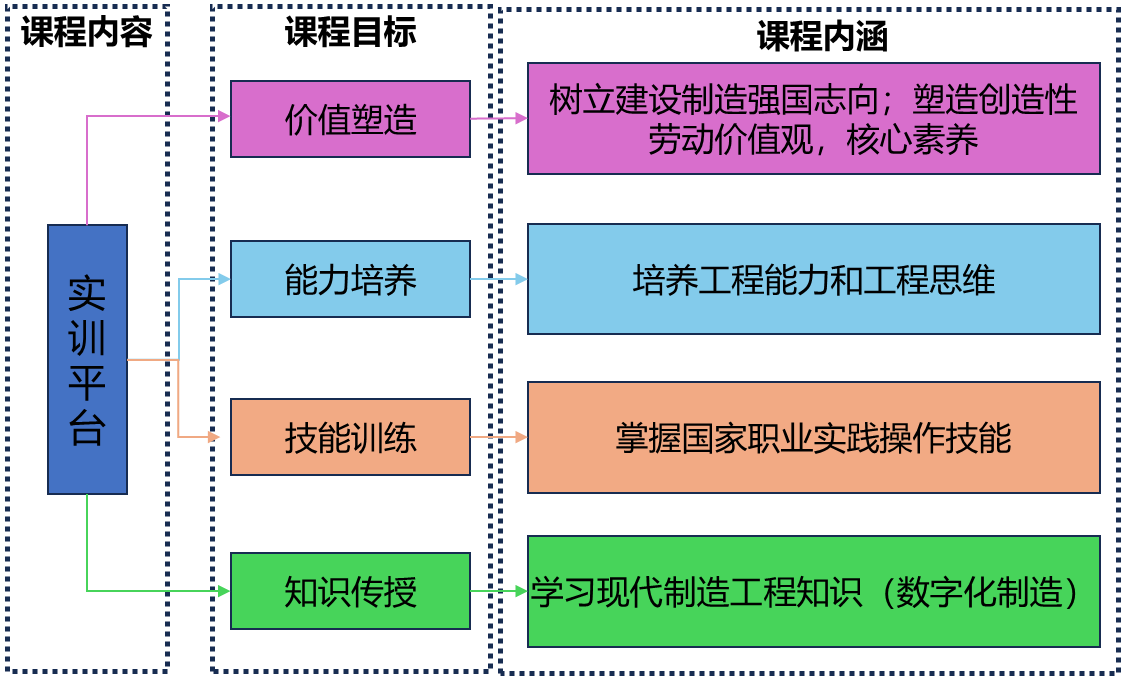
项目建设目标和内容:
让学生能够从原理认知出发,逐步掌握硬件调试、算法开发与问题排查能力,完成从理论到实践的完整学习路径,系统培养其在机器人领域的工程实践认知。
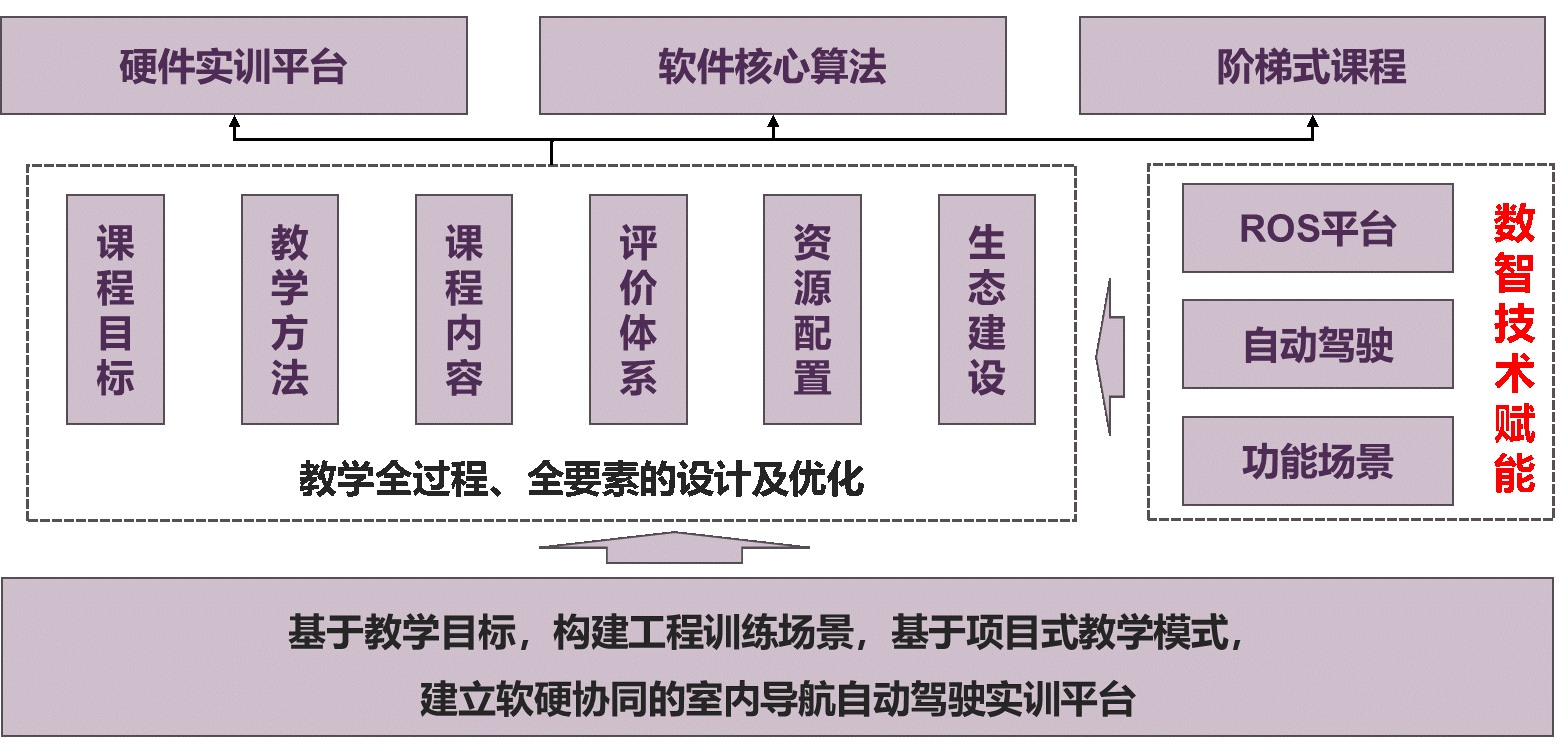
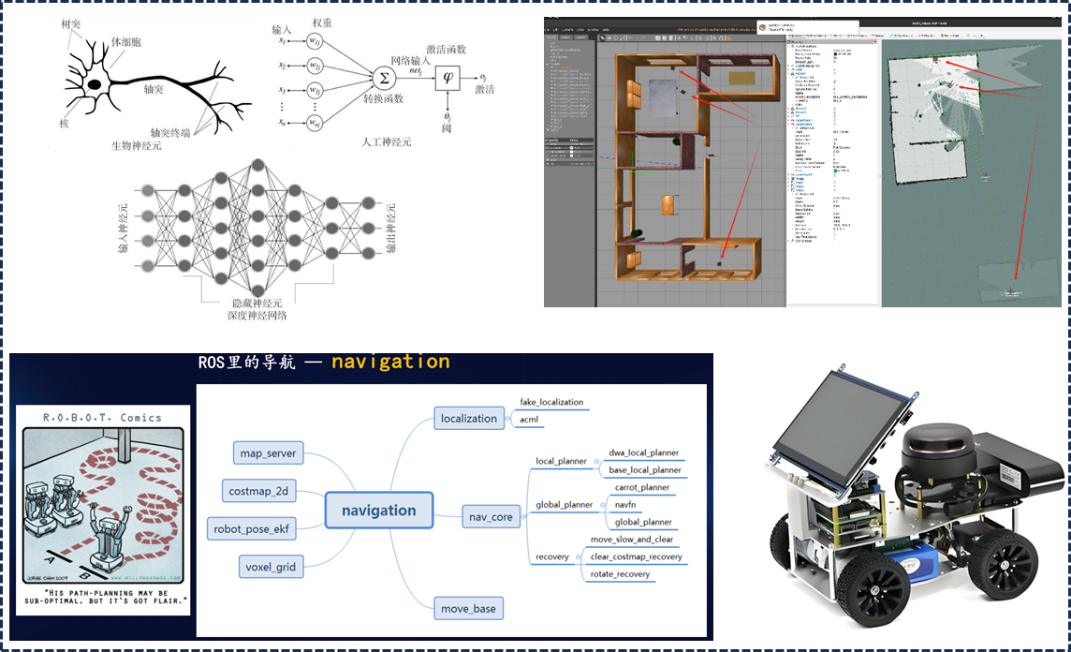
构建一个以“室内建图-自动驾驶-避障”为核心功能的轮式机器人教学实训平台,基于ROS机器人操作系统整合激光雷达、深度相机等硬件,形成一套集“硬件平台 + 软件算法 + 阶梯式课程”于一体的综合教学体系。


项目预期建设成果和交付形式:
项目成果包括一套实训平台及配套的课程资源。
实训平台包括可运行的 “激光雷达 + 深度相机 + 轮式底座” 硬件套装,且预装 ROS 及建图、导航、避障算法;交付形式为实体硬件平台,包括接线说明、硬件清单。
课程资源包括《ROS机器人整体介绍》、《运动底盘的控制与运动学解析》以及《源码讲解》,交付形式为电子版文档。

| 模块名称 | 主要内容聚焦 | 核心教学目标 |
| ROS基础理论与系统构建 | ROS核心概念、通信机制、工作空间与功能包创建 | 掌握ROS基本框架,能够搭建和运行标准的ROS项目 |
| 机器人运动学理论与模型 | 机器人位姿描述、正逆运动学分析、URDF模型构建 | 理解机器人运动学数学模型,并能用URDF描述机器人 |
| 运动底盘控制原理与仿真 | 差速模型控制、传感器融合、Gazebo仿真与环境构建 | 掌握运动底盘控制算法,能够在仿真环境中实现导航功能 |
| 系统源码分析与深入实践 | 关键功能包(如turtlebot3、navigation)源码剖析 | 深度理解底层实现,具备定制化修改和调试能力 |
| 综合项目实训与创新应用 | 以小组形式完成一项完整的机器人应用开发项目 | 整合所学知识,提升解决复杂工程问题和团队协作能力 |
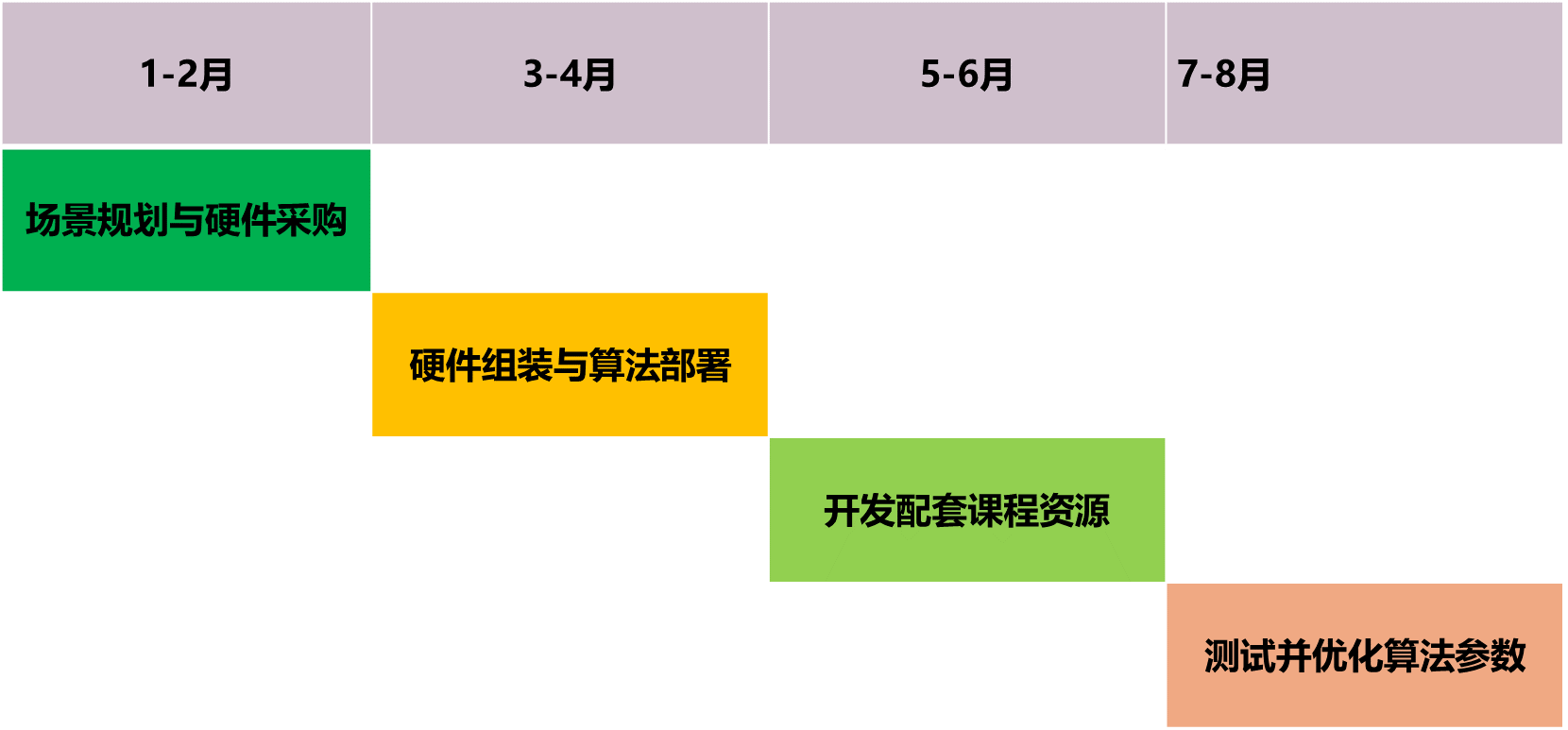
项目安排及进度:
项目计划在8个月内分阶段实施:第1-2月完成场景规划与硬件采购;第3-4月进行硬件组装与ROS算法部署,实现建图、导航与避障功能的联调;第5-6月重点开发配套课程资源,包括实验指导书和系列教学视频;第7-8月开展教学试点,测试平台稳定性并优化算法参数;最后进行功能验收演示,完成教师培训与全部技术文档归档,确保平台交付即可用于实训教学。

©当前作品的著作权归作者所有。本站所有软件均来源于网络,仅供学习使用,请支持正版!
转载请注明出处: iMuseum数字创新博物馆 » 轮式机器人室内自动驾驶教学实训平台